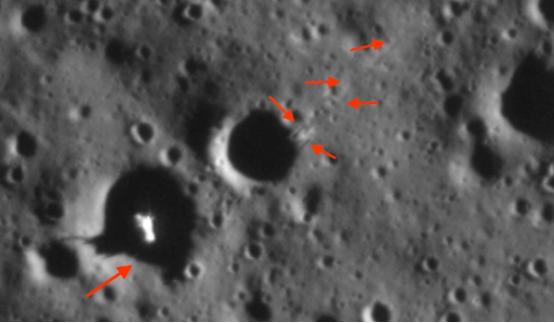
被月球给坑了。这是印度月船二号最新拍摄的画面,美国直觉机器公司的IM-2着陆器,刚好翻倒在一个陨石坑里,附近还有摩擦的痕迹,说明登月器最后是在点火状态下发生了倾倒,然后漂走了。此前IM-1也是在着陆时崴了脚,一头栽倒了。 事情得从2024年2月的IM-1任务说起。当时直觉机器公司的“奥德修斯”着陆器搭乘SpaceX的猎鹰9号火箭升空,目标是在月球南极附近的MalapertA陨石坑实现软着陆。 这是美国自1972年阿波罗17号以来首次尝试月球软着陆,本应是里程碑式的突破。然而当“奥德修斯”在2月22日接近月面时,意外发生了——着陆器在下降过程中突然侧翻,6条着陆腿中的一条折断,整个机身斜靠在月表的岩石上。 事后调查发现,这是因为发射前工作人员忘记手动解锁激光制导测距仪的安全开关,导致导航系统在关键阶段出现传感器故障。虽然着陆器勉强完成了部分科学实验,但太阳能电池板和通信天线无法正常展开,最终因电力耗尽提前结束任务。 谁也没想到,类似的悲剧在一年后再次上演。2025年3月6日,直觉机器公司的第二个着陆器“雅典娜”(IM-2)在月球南极MonsMouton地区着陆时再次侧翻。 这次事故被印度的“月船二号”轨道器全程记录下来:画面中,“雅典娜”在距离月面约50米时突然发生倾斜,发动机尾焰在月壤上划出明显的摩擦痕迹,随后整个着陆器向一侧倾倒,最终翻滚着滑入一个直径约20米的陨石坑。 更严重的是,侧翻导致太阳能电池板无法对准太阳,着陆器在短短几小时内就因电池耗尽失去动力,原本计划持续数周的科学任务戛然而止。 这两次失败的背后,是月球表面远超地球的复杂挑战。月球没有大气层,着陆器只能完全依靠发动机反推减速,而月壤的松软和陨石坑的陡峭地形极易导致失衡。 以IM-2为例,其着陆点距离预定目标偏差超过400米,周围布满碎石和陡峭的环形山边缘。当着陆器试图在最后阶段调整姿态时,月壤的不均匀阻力和发动机羽流的反作用力形成合力,最终将其“掀翻”。这种情况在地球的模拟试验中很难完全复现,因为月壤的颗粒结构和力学特性与地球土壤有本质区别。 技术上的短板也不容忽视。IM-1的失败直接源于人为操作失误,而IM-2则暴露了导航系统的局限性。尽管直觉机器公司声称通过软硬件升级将着陆精度提高了20倍,但实际表现仍未达到预期。 相比之下,中国嫦娥六号在2024年6月成功着陆月球背面时,采用了“粗精接力避障”技术——先用光学成像敏感器进行大范围地形扫描,再用激光三维成像敏感器进行厘米级精度的障碍识别,最终实现了“指哪儿落哪儿”的精准着陆。这种技术路径显然比直觉机器公司依赖单一传感器的方案更可靠。 更麻烦的是,月球表面的极端环境会对设备造成持续损害。例如,月尘带有静电且锋利如玻璃碴,会渗入着陆器的关节和电路;昼夜温差超过300摄氏度的环境会导致金属部件热胀冷缩变形。 IM-2着陆后拍摄的照片显示,其着陆腿表面覆盖了一层灰白色的月尘,这些细微颗粒很可能影响了机械结构的灵活性。而在月夜来临后,没有阳光加热的着陆器内部温度会骤降至零下180摄氏度,任何未做特殊防护的电子设备都会迅速失效。 直觉机器公司的困境并非孤例。2024年1月,Astrobotic公司的“游隼”号着陆器同样因推进系统故障坠毁;更早的2019年,印度“月船二号”的着陆器“维克拉姆”号在距离月面2.1公里时失联。 这些案例共同揭示了一个现实:月球探测远非想象中那么简单,即便是经验丰富的航天机构,也可能在看似微小的环节上栽跟头。 不过,失败也是技术进步的阶梯。直觉机器公司已经表示,将基于这两次任务的数据对导航算法和着陆腿结构进行优化,例如增加冗余传感器和采用更坚固的材料。 NASA也在其“阿尔忒弥斯”计划中强调,未来的月球着陆器必须具备更强的自主决策能力,能够在没有地球实时指令的情况下应对突发状况。 中国航天的实践则提供了另一种思路——通过地面的1:1月面地形模拟试验,提前验证各种极端情况下的着陆方案。这种“把问题解决在地球上”的策略,或许能为商业航天企业提供宝贵借鉴。 对于直觉机器公司而言,连续两次“被月球坑了”既是挑战也是机遇。如果能从失败中吸取教训,改进技术流程,他们仍有可能在NASA的“商业月球有效载荷服务计划”中占据一席之地。 毕竟,月球探测的终极目标不是单次任务的成功,而是建立长期可持续的探索能力。正如嫦娥六号在月背采样时所展示的,人类要想真正“征服”月球,还需要在技术创新、风险管控和资源整合等方面下更大的功夫。