车载激光雷达、毫米波雷达或许起负面作用?
首先叠个甲,本菜不懂汽车智能驾驶技术,所有认知来自有限的、片面、不客观的军用探测器知识,本菜买车也选了带激光雷达和毫米波雷达的版本,毕竟花差不多的钱多一些配置总是好的。
粗略搜了下车载毫米波雷达、激光雷达的内部、外部噪声还真是复杂。首先商用器件受成本限制不大可能像军用实验室一样把内部噪声降到最低,毕竟一部车才二三十个w,几个毫米波雷达总不能几万乃至几十万成本吧。
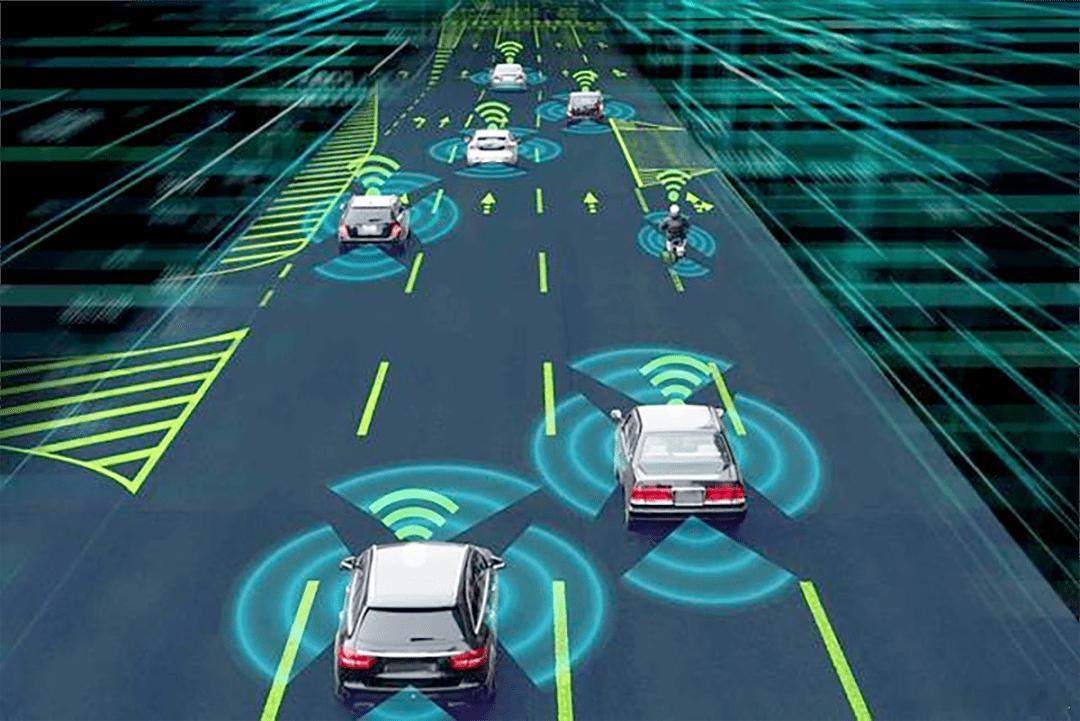
车载雷达的外部噪声花样贼多,任何被雷达探测到、但不应该在行车安全威胁列表内的人为、自然物体都可称为噪声,因为它们会给车载雷达带来干扰、虚警,使智驾程序产生不希望的响应。要排除这些外部噪声同样需要很高的技术手段,比如算力要求极高的空间滤波等等,所以商用器件同样受限于成本。
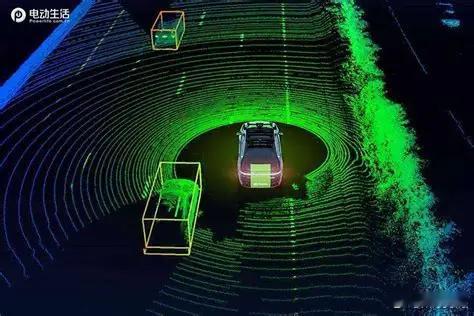
车载雷达搜了下也是有副瓣的。我们知道在空载雷达中副瓣是极为重要的干扰因素,对于距离模糊的雷达系统,副瓣杂波是最重要的外部噪声。车载雷达的副瓣很容易探测到对向车道上来车,以及行人、电动车、摩托车,路边的交通设施等等不胜枚举的事物,这就给智驾软件判断威胁上很高的强度了。
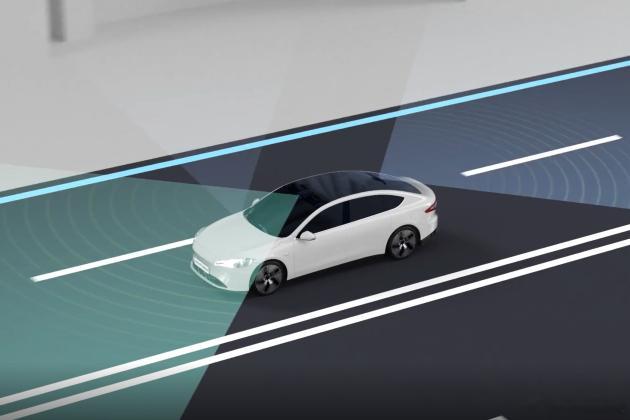
为了应付上述所有的干扰,最简便的方法是提高门限,把所有可能得假信号全都去除,当然这会大大降低探测器灵敏度,另外高速行驶限制传感器增益,就像机载雷达根据目标距离作增益控制。这样看某某车企的全视觉方案或许有可取之处,因为它排除了主动雷达可能的干扰。视觉雷达可看作被动雷达系统,只不过工作在可见光波段。
本菜提出一种“基于图像识别的多光学摄像头协方差矩阵空间滤波确定环境物体距离”,听着挺有道理不过是胡嗻的,因为这可能需要非常高的、车载计算机无法实现的实时算力[doge]