
无线驱动飞行机器人啥原理?咋控制?
*本文只做阅读笔记分享*
一、微型飞行机器人的研究背景与挑战
大家知道吗?在过去几十年里,微型飞行机器人的研究一直是个热门话题。
科学家们费了好大劲,就为了解决像动力供应、推进效率和空气动力学这些难题。
随着飞行机器人的系统质量和翼展不断减小,以前都是用电线来供电,这样能减轻负载,不用机载电池或超级电容器了。可这些带电线的飞行机器人在复杂环境里根本没法自由活动。
后来厘米级飞行机器人有了突破,能用光、风、电磁波这些外部能源实现无束缚飞行。还有用磁场和驱动机制的,能无线供电,控制起来方便,反应也快。不过呢,这些磁性机器人大多只能在表面或水下活动,没办法飞行。
今天,咱们就来认识一款超厉害的9.4毫米无束缚飞行机器人,它靠单轴交变磁场就能实现各种可控飞行!
二、飞行机器人的设计与工作原理
这款机器人主要由两部分组成。一部分是用3D打印出来的主体结构,有四个螺旋桨叶片和一个平衡环,质量只有14.7毫克;另一部分是两个小永磁体,每个质量3.15毫克,直径1毫米,厚度0.5毫米,加起来整个机器人重21毫克,翼展9.4毫米,是目前能实现无束缚、可操控飞行里最小的。
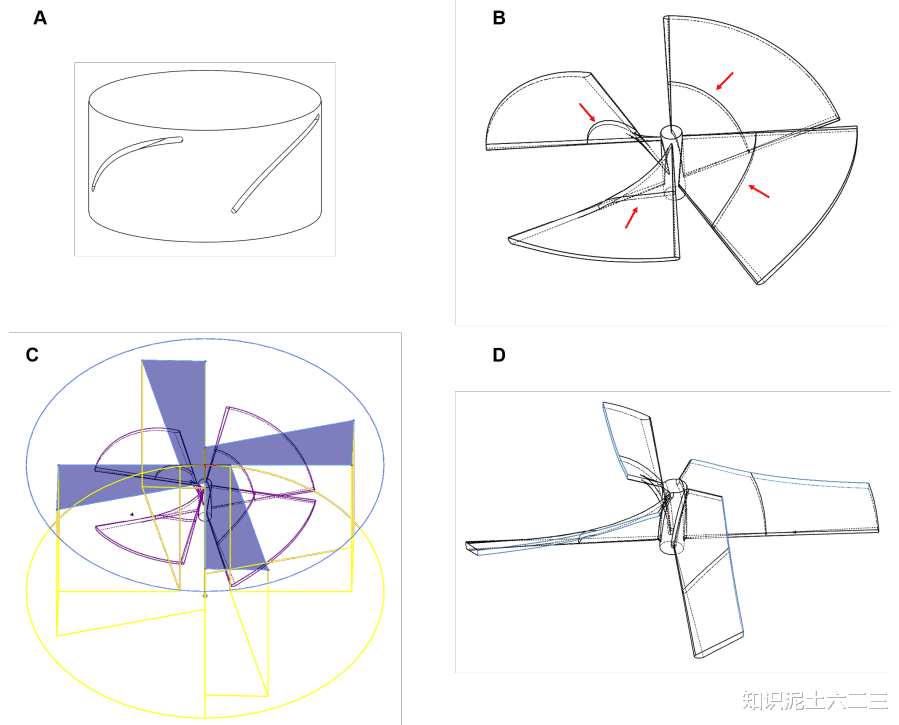
它的工作原理也很有趣。在单轴交变磁场里,永磁体受到磁场扭矩作用,会试图让自己的磁场方向和外部磁场方向一致,这样就带动螺旋桨持续旋转,产生升力。平衡环也很重要,在高频旋转时,它能增加机器人的转动惯量,产生很强的陀螺效应,让飞行姿态更稳定,操控起来也更灵活。

三、飞行机器人的性能测试与分析
为了研究这个机器人,科学家们做了好多实验。先看它的旋转运动,用光学装置和高速摄像机来测量它的滞后角和角速度。在16.1mT、320Hz的交变磁场下,机器人的旋转运动和交变磁场之间有个12°的滞后角,这就导致角速度会有波动。不过在相对较高的工作频率下,角速度变化还挺小,不到10%。
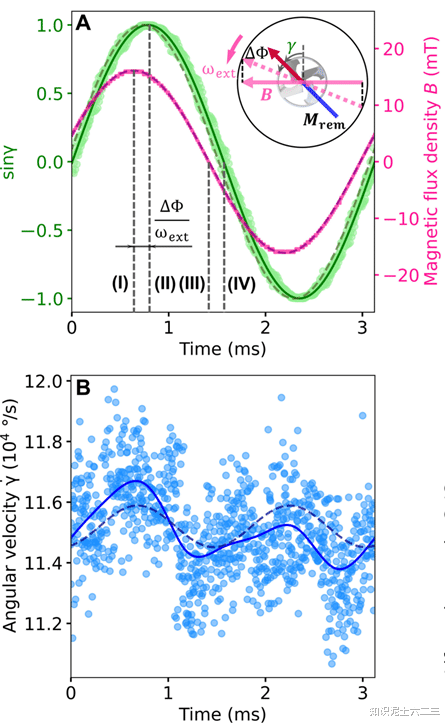
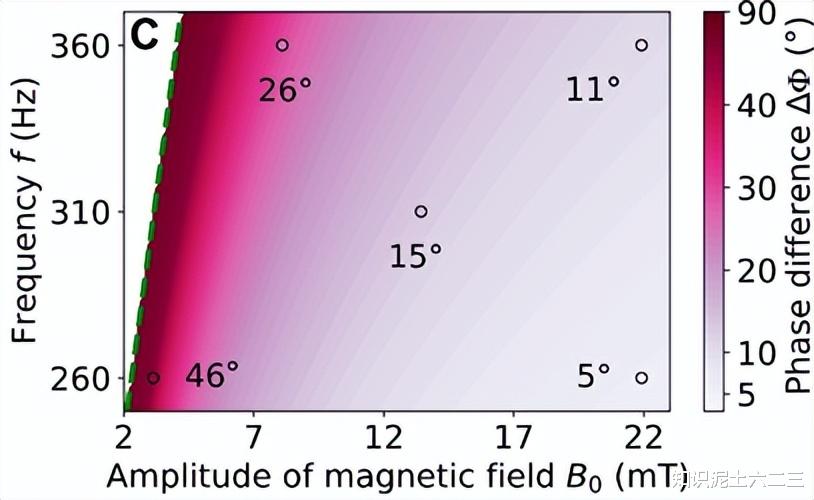
再说说磁场强度和驱动频率对滞后角的影响。实验结果和模拟结果都显示,滞后角是稳定飞行的关键参数。磁场强度增加,滞后角会减小;驱动频率改变,也会影响滞后角。而且在实验里还发现,机器人能自动调整滞后角来适应磁场强度变化,这可太智能了!
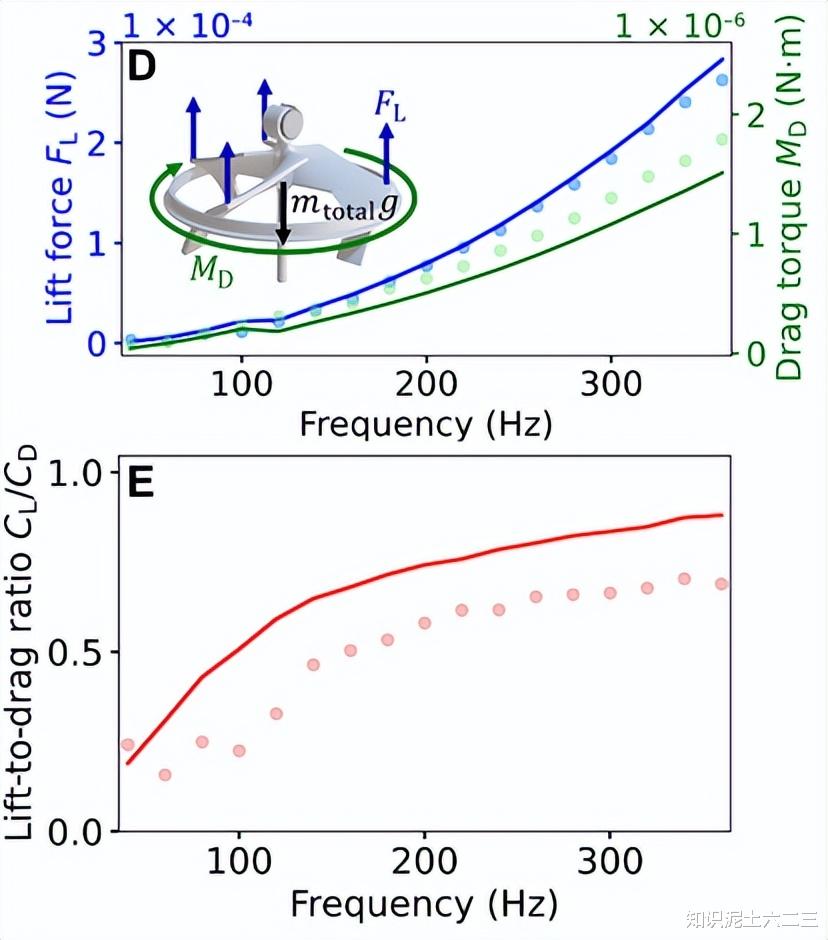
还有它的空气动力性能,通过建立简化的空气动力学模型,研究不同驱动频率下机器人周围的气流速度和压力场测量的升力和阻力扭矩随驱动频率的变化,升力和阻力扭矩都随着频率增加而增加,和模拟结果很吻合。在250Hz左右,升阻比能达到0.7,之后进入平稳阶段,这是因为低频率时粘性阻力占主导,高频率时压力阻力逐渐变大。
起飞的时候,先把机器人放在轴承系统上,用镊子保持直立,在低磁场强度和低驱动频率下,用吹风机吹点微风让它逆时针转动产生升力。随着驱动频率慢慢增加,再关掉气流,调整电路增加磁场强度,当螺旋桨速度达到310-350Hz这个范围,机器人就能起飞啦!
四、飞行机器人的飞行演示与控制
这个机器人的飞行能力超厉害!向上飞行的时候,姿态特别稳定,它持续向上飞行的过程,能看到它一直保持直立。从飞行高度和俯仰角随时间变化的曲线能发现,俯仰角会周期性变化,频率大概30Hz,波动很小。而且它产生的升力比自身重量大14%,要是提高驱动频率,还能携带更多负载呢。

短时间悬停飞行也没问题,虽然每次悬停时间不到0.5秒,容易和实验装置碰撞,但这个9.4毫米的机器人在300Hz频率下悬停了422毫秒。碰撞的时候,它也能保持一定稳定性,碰撞后速度和方向会改变,但俯仰角变化不到5°。很多时候碰撞后还能自我恢复,碰撞后俯仰角大幅波动,之后慢慢恢复到初始姿态,只要碰撞后俯仰角偏差小于23°,就很可能恢复飞行。

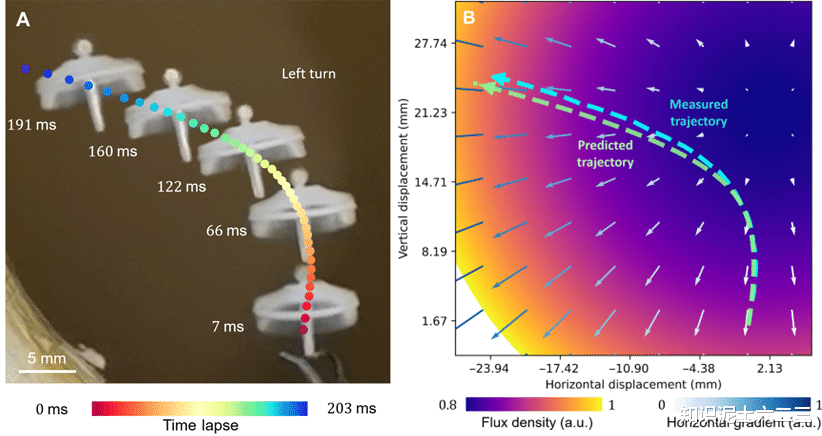
它的横向运动也能控制,通过磁场梯度就能实现。实验发现,在起飞频率附近,横向力和磁场梯度成正比。利用这个特性,就能通过调节磁场梯度来控制机器人的飞行轨迹,实现左转、右转这些动作。实验结果和数值模型结果很匹配,而且还能实现右转飞行,说明这种控制方法可重复。
五、与现有技术的对比
和其他飞行物体比起来,这个机器人可太突出了!从不同飞行物体的特征尺寸和重量的关系,之前最小的成功飞行的机器人直径28毫米,而自然界最小的飞行昆虫只有0.15毫米。在质量小于1克的无束缚飞行机器人里,只有少数几个成功案例,咱们这款21毫克的机器人就是其中之一。

再看看它的升力与飞行功率比(LFPR),和其他研究及生物对比,这个机器人表现也很好。它悬停时输入功率不到3.0mW,LFPR达到0.072N/W,超过了大部分研究,只比4.21克的CoulombFly和16克的DelFlyII略低一点,这都多亏了远程能量供应和高效的空气动力学设计。
六、总结与展望
通过调节单轴交变磁场,这款昆虫尺度的无束缚飞行机器人实现了高效稳定的飞行,还展示了各种飞行操控能力。分析模型、数值模拟和实验结果都很一致,为未来进一步小型化提供了重要指导。
不过呢,要想赶上甚至超越真正的飞行昆虫,还有很长的路要走。未来可以从这几个方向努力:用先进的多线圈系统扩大飞行范围,改进设计、材料和机制提高飞行控制能力和负载能力,研发机载能量转换装置,还有低延迟的无线通信系统。
要是这些都实现了,昆虫尺度的飞行机器人就能在很多领域大显身手,像胃肠道内窥镜检查、管道内检测,还有搜索救援、环境监测、农业支持等等。
七、一起来做做题吧
1、关于微型飞行机器人的发展,以下说法正确的是( )
A. 早期微型飞行机器人使用机载电池供电以减轻负载
B. 厘米级飞行机器人无法利用外部能源实现无束缚飞行
C. 本文研究的飞行机器人是首款使用磁场驱动的机器人
D. 微型飞行机器人的发展面临动力、效率和空气动力学等挑战
2、关于本文中飞行机器人的设计,说法错误的是( )
A. 主体结构由 3D 打印制成,包含螺旋桨叶片和平衡环
B. 永磁体质量小,每个直径 1 毫米,厚度 0.5 毫米
C. 总重量 21 毫克,是目前报道的最轻的飞行机器人
D. 叶片几何形状经试验修改以适应低雷诺数区域
3、在飞行机器人的性能测试中,以下结论错误的是( )
A. 机器人旋转运动与交变磁场存在滞后角,导致角速度波动
B. 磁场强度增加,滞后角会增大
C. 升阻比在 250Hz 左右达到 0.7,之后进入平稳阶段
D. 起飞时需调整磁场强度和驱动频率等参数
4、关于飞行机器人的飞行演示,说法正确的是( )
A. 向上飞行时姿态不稳定,俯仰角波动大
B. 悬停飞行时间长,不易与实验装置碰撞
C. 碰撞后一定能恢复飞行
D. 可通过磁场梯度控制横向运动
5、对比现有技术,本文的飞行机器人( )
A. 在尺寸和重量上没有优势
B. LFPR 值低于大部分研究
C. 是目前最小的成功飞行的机器人
D. 利用远程能量供应提高了 LFPR 值
参考文献:
Fanping Sui et al. Untethered subcentimeter flying robots. Sci. Adv.11, eads6858(2025).
