[LG]《Open-Universe Assistance Games》R Ma, J Qu, A Bobu, D Hadfield-Menell [MIT CSAIL] (2025)
Open-Universe Assistance Games(OU-AG)框架,突破传统预定义目标限制,支持AI代理在开放、动态的人类目标空间中进行推理与行动。
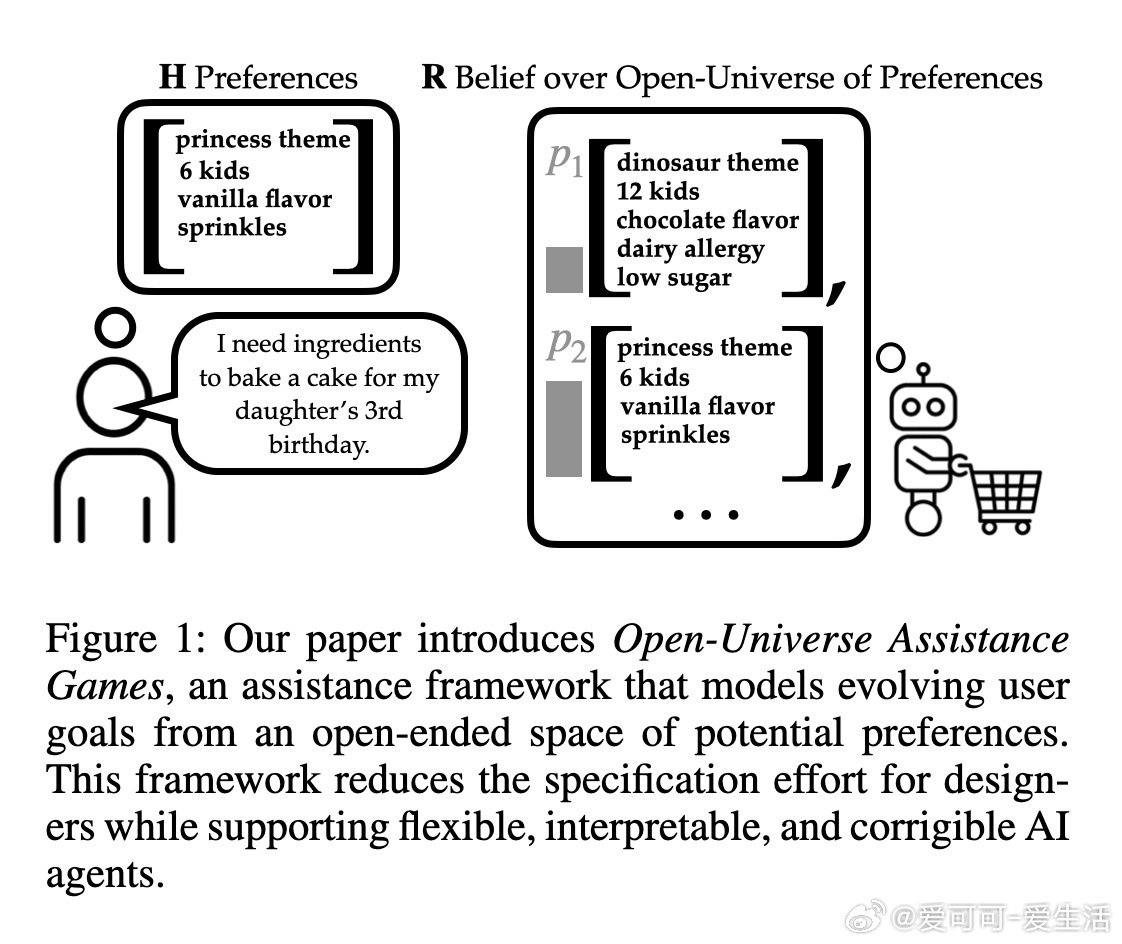
• 引入GOOD(GOals from Open-ended Dialogue),利用LLM在线从自然语言对话中提取、生成和筛选目标假设,实现对复杂人类目标的显式跟踪和概率推断。
• GOOD结合了离线偏好学习的适应性与在线学习的数据效率,无需大规模离线数据即可处理开放领域对话,支持灵活、自然的交互。
• 实验覆盖文本基础的购物场景和AI2Thor家庭机器人模拟环境,结果显示GOOD在目标推断和行动质量上显著优于仅依赖全对话上下文的基线方法。
• 设计了动态目标集合的演化模型,支持代理根据对话内容不断更新目标信念,有效解决目标空间无界且不断变化的挑战。
• 采用基于Beta分布的胜负统计方法,对候选目标集进行概率推断,实现目标优先级排序,指导行动策略选择。
• 研究展示,明确目标建模提升了行动效率与用户满意度,LLM辅助的目标推断为复杂人机协作提供了可解释、灵活的解决方案。
未来展望包括融合视觉语言模型实现多模态输入处理,以及通过更多人类实验验证基于目标的交互优势。
详细阅读👉 arxiv.org/abs/2508.15119
人工智能大语言模型人机交互目标推断可解释AI开源研究机器人动力学