[RO]《Neural Robot Dynamics》J Xu, E Heiden, I Akinola, D Fox... [NVIDIA] (2025)
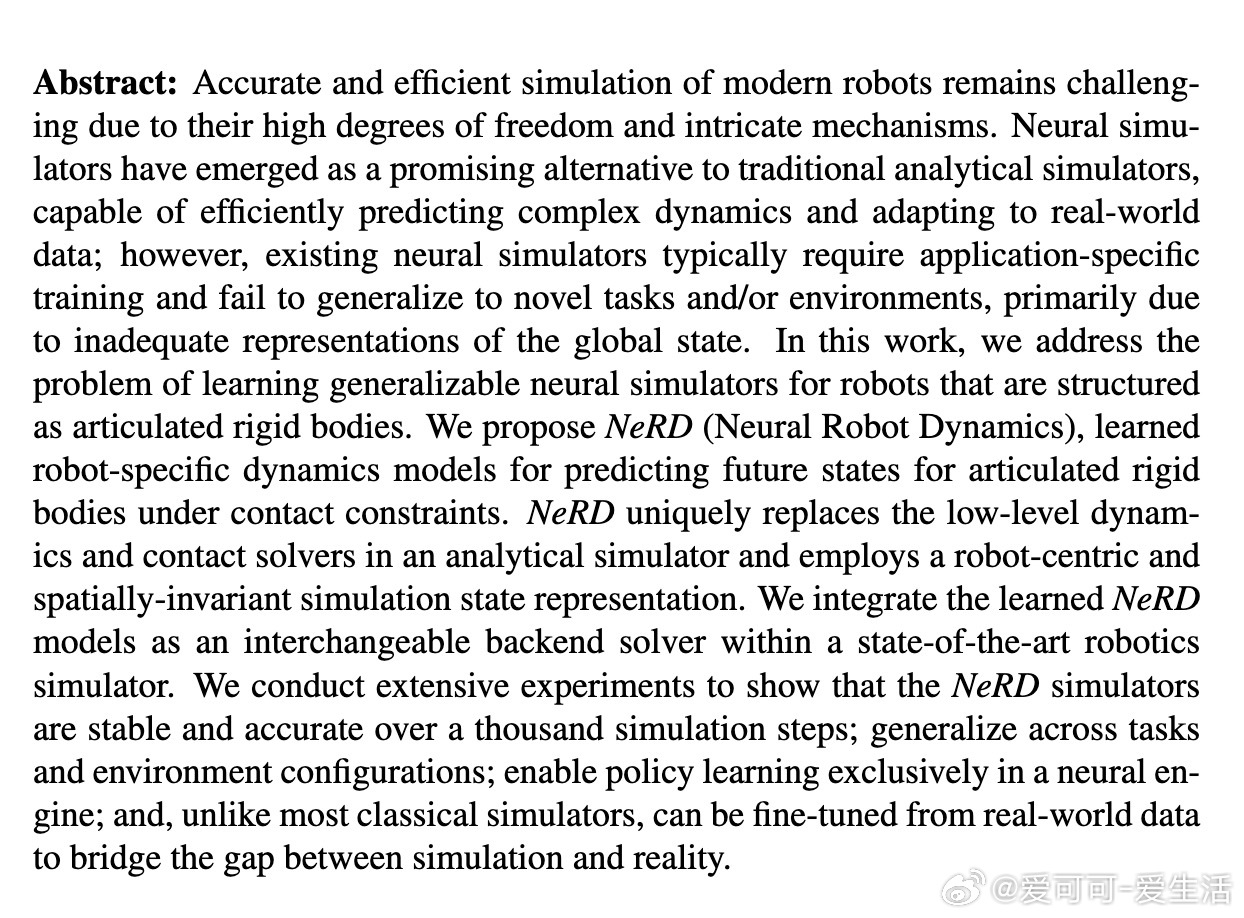
NeRD:突破传统,实现高精度通用机器人动力学神经仿真
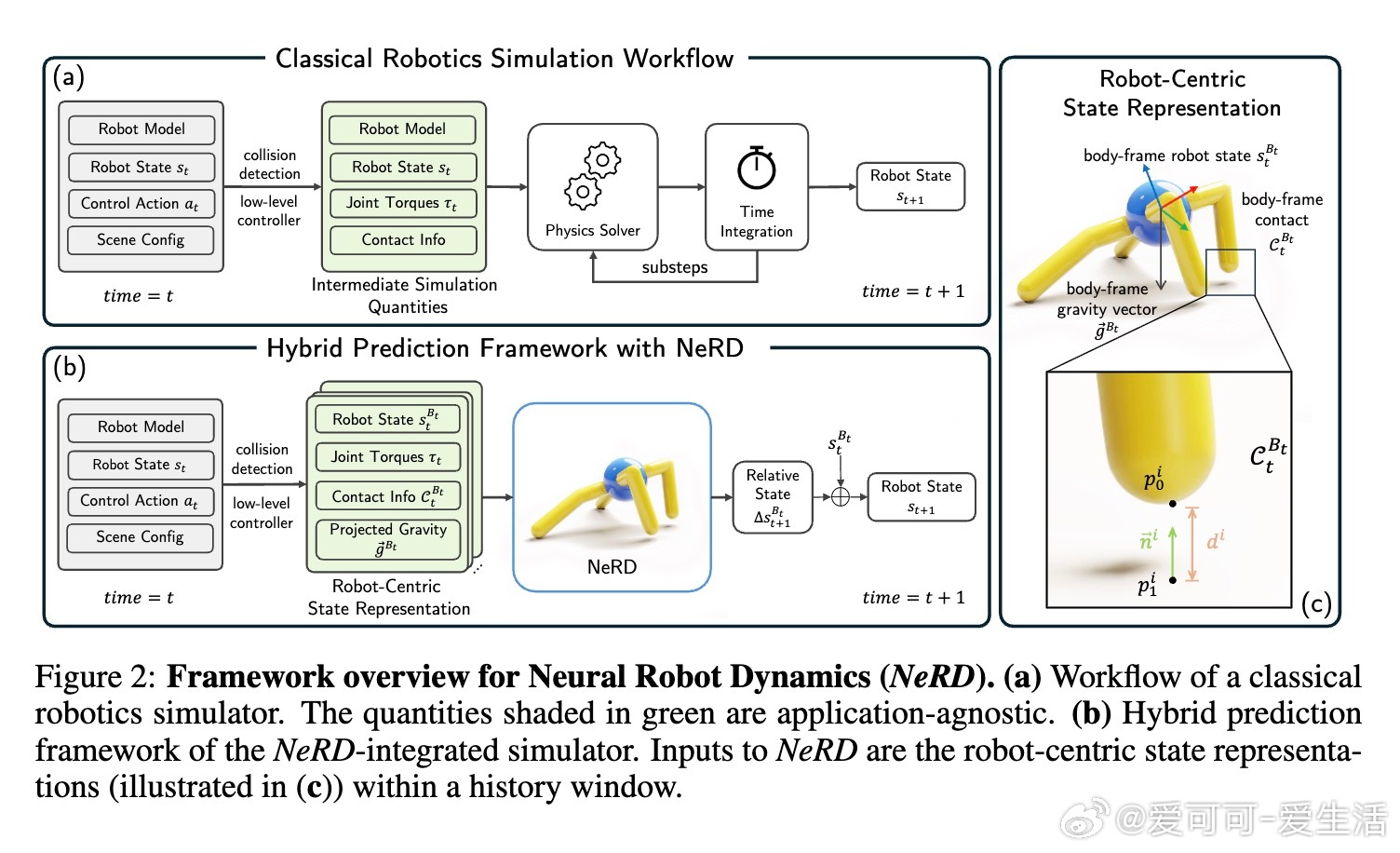
• 仅替换传统仿真器中低级动力学与接触求解模块,采用机器人中心且空间不变的状态表示,优化模拟泛化能力。
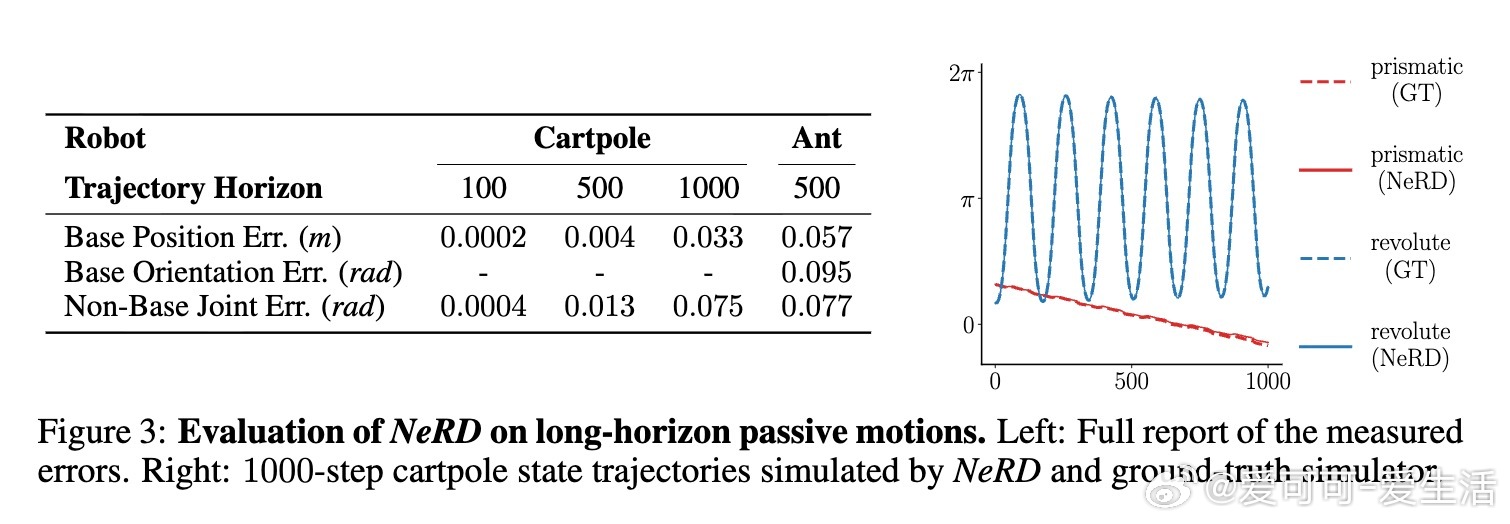
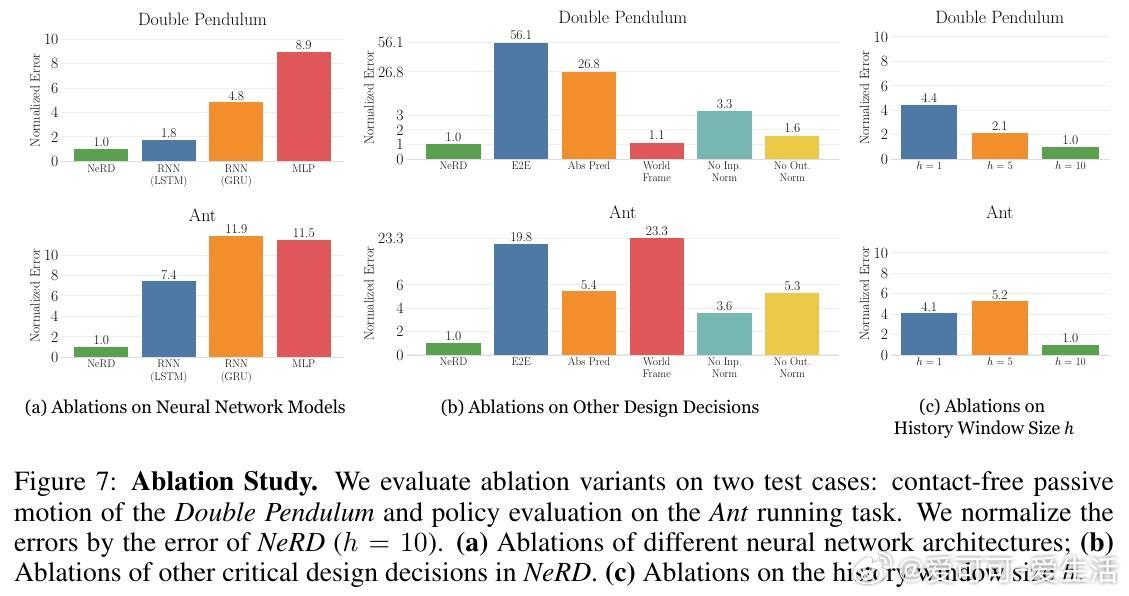
• 通过历史窗口输入机器人状态、接触信息及关节力矩,预测未来状态差分,实现稳定准确的长时序仿真(千步以上)。
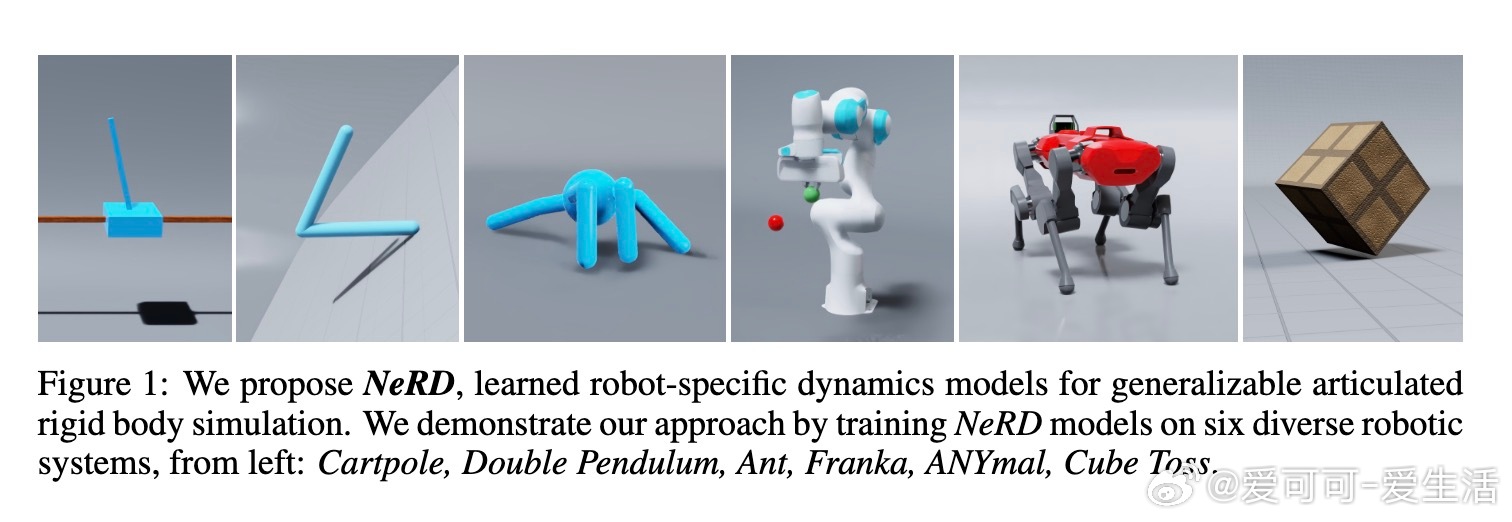
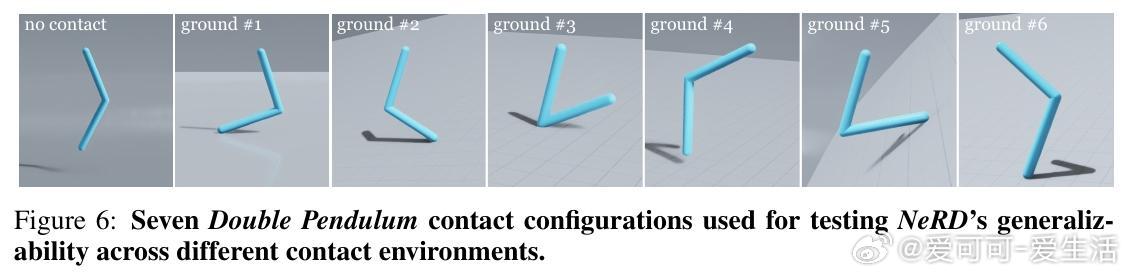
• 支持多机器人系统(Cartpole、Double Pendulum、Ant、Franka、ANYmal等),训练数据任务无关,泛化至新任务、环境与控制器。
• 结合NVIDIA Warp仿真器,NeRD作为可替换物理引擎,可无缝接入现有策略学习环境,仅需一行代码切换。
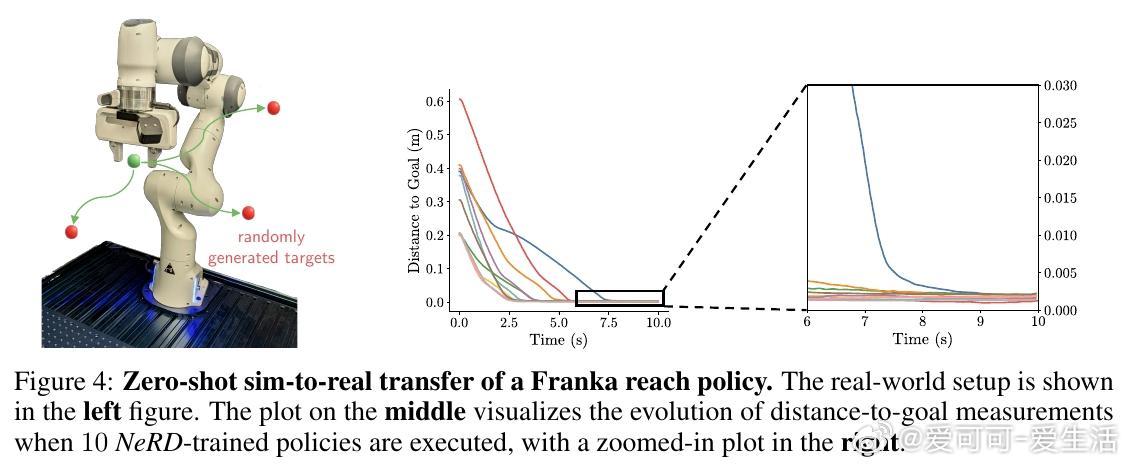
• 实现多任务强化学习策略纯神经仿真训练,零样本转移至传统仿真器及真实机器人,验证真实世界适用性。
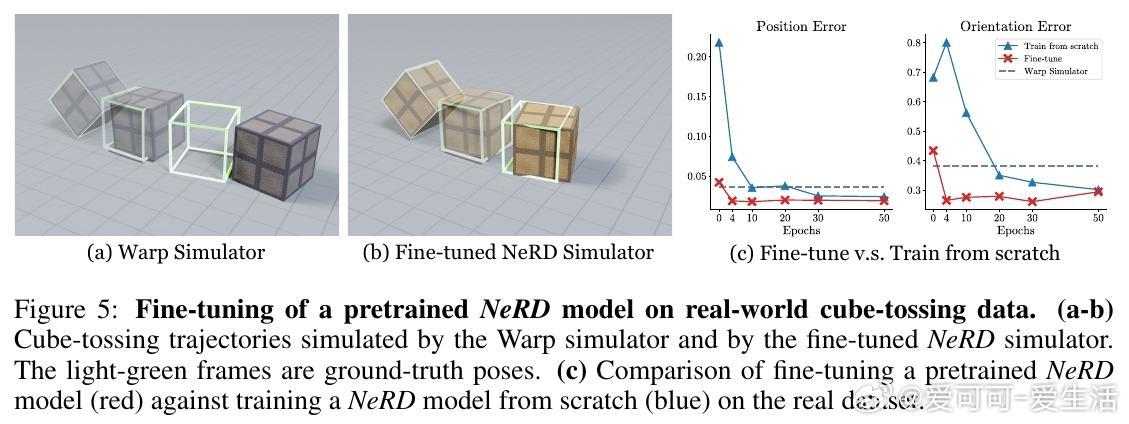
• 具备从真实数据高效微调能力,快速缩小仿真与现实差距,训练速度比零起点快10倍以上。
• 采用轻量级GPT-2 Transformer结构,历史信息融合提升预测准确性,输入输出归一化确保训练稳定性。
• 开创性引入机器人局部坐标系编码环境和重力信息,显著提升空间泛化和训练效率。
未来方向涵盖更复杂机器人(如人形机器人)以及半观测现实数据微调,推动神经模拟器在机器人设计与控制领域的广泛应用。
详细解读👉 arxiv.org/abs/2508.15755
机器人动力学神经仿真强化学习机器人控制人工智能