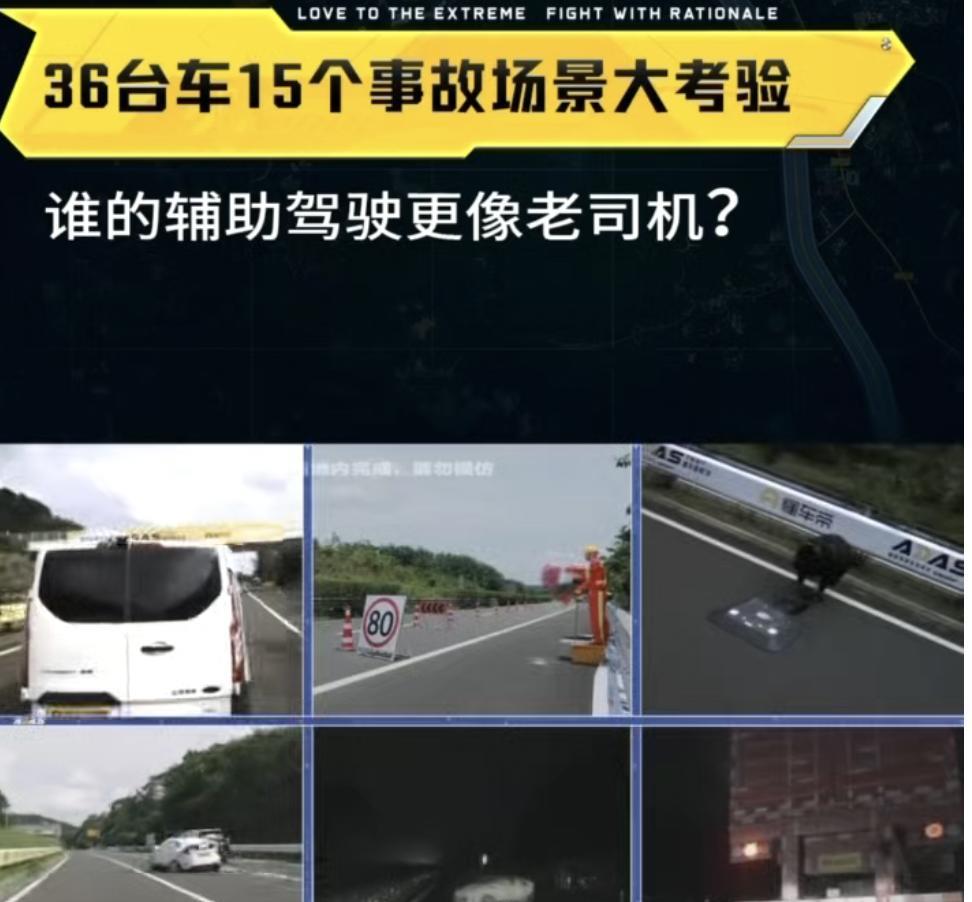
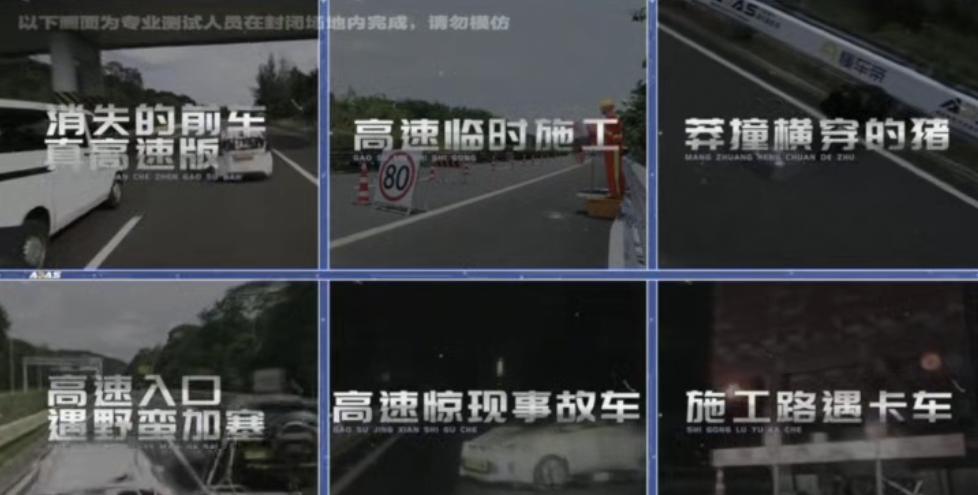
这是故意“死亡游戏” 测评方法有哪些缺陷?对比国家标准一目了然 By【beta贝塔实验室】 懂车帝的智驾测试科普节目使用的测评标准和方法是否错配?有哪些缺陷? 参考国家和行业标准【C-NCAP-2025AEB场景】,可以给出结论:的确偏差很大。 比如,高速事故场景中,静态障碍物(图中VT2静止的假车)的避让,消失的前车(VT1),VUT是测试车辆。 而测试中 ,“消失的前车”场景仅设30米避让距离(时速100km/h),不足C-NCAP安全距离的36%;直接超出L2级系统的物理极限。这种反现实场景就像要求小学生解微积分,除了证明“无法通过”之外,毫无意义。 而特斯拉是通过拉大跟车距离(120米)通过了测试,现实场景中,拉大距离会牺牲通行效率。 缺陷2.施工桩筒与一辆入侵车道的卡车,两者只有 2.5 米间距,测试车辆需在最高 130 公里 / 小时的速度下,通过这个缝隙。更是个反智的陷阱。首先,真实道路上公路养护规程规定:桩桶和障碍物间距必须大于3.5米。2.5米间距仅仅比标准轿车宽度约1.8米多70厘米,卡车轻微摆动或路面颠簸就引发碰撞。以130公里也就是36.1m/s通过,允许最大转向角度只有0.76度,而且L2级系统横向控制延迟普遍大于0.2秒,这不是故意制造“死亡游戏”吗? 3.当测试车辆速度超过40公里/小时后,国家标准的测试方法就不再是通过驾驶员+AEB而是FCW前方预警+机器人模拟制动。机器人通过电子控制接口,执行制动动作。因为,人类驾驶员,在高速80-100-120车速时,遇到这种紧急危险场景,出于自我保护意识,在制动时机、力度、持续时间等方面肯定不能保证一致。而机器人能消除这种人为反应误差确保每次制动操作都一致和精准(误差可控制在毫秒级)。 特别是华为ADS系列的车型,它避免高速时车辆与车辆冲突的策略是默认优先绕行,而非急刹,因为高速急刹是很危险的,会导致轮胎抱死、侧滑失控,或后车追尾。比如有网友指出:问界M9在测试视频中有规划向左绕行的意图,但是好像被驾驶员强制回正了。 所以,100公里时速时的测试项目应该是“预警提前时间“,确保在 150 米外识别到前方事故车并预警,减速。而非AEB刹停。 所以,这个测试更像人为设计的一个个惊悚的“死亡游戏”画面,娱乐真人秀,而非科学框架下的安全评估。 简单说1. 评测的变量是否一致。2.场景选择是否偏差3.对所有技术路线的车型是否都公正合理。我相信这就是一场别开生面的科普娱乐节目。